Watch As The Most Massive Robotic Swarm Work Together To Form Complex Shapes
Harvard computer science researchers have created tiny robots that complete tasks by working together. Though many teams of scientists have over time managed to link simple robots together then issue commands, this is in itself revolutionary. They are on an entirely different level! Imagine the 1024 of them moving in concert? Â Together they comprise the largest, most impressive robotic swarm to ever be created. They have been named Kilobots which somehow almost sounds like killbots, but okay.

[quote_box_center]Researchers who have been working on the Kilobot Project say that: Â “In current robotics research there is a vast body of work on algorithms and control methods for groups of decentralized cooperating robots, called a swarm or collective. These algorithms are generally meant to control collectives of hundreds or even thousands of robots; however, for reasons of cost, time, or complexity, they are generally validated in simulation only, or on a group of a few 10s of robots. To address this issue, we designed the Kilobot, a low-cost robot designed to make testing collective algorithms on hundreds or thousands (“kilos”) of robots accessible to robotics researchers. Each robot has the basic capabilities required for a swarm robot, but is made with low-cost parts, and is mostly assembled by an automated process. In addition, the system design allows a single user to easily and scalably operate a large Kilobot collective, such as programming, powering on, and charging all robots systems.”[/quote_box_center]
Each kilobit is an inch-wide and has three peg-like legs that are powered by vibration motors. It uses this to help it slide around when responding to commands given over an infrared control system. One single kilobot’s behavior is limited and simple, but when a thousand of them are combined, complex behaviors are generated without the use of high level programming. It’s more like building a virtual ant’s colony rather than a robotic humanoid.

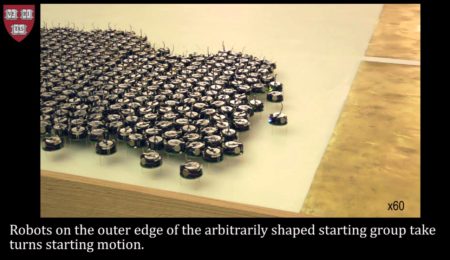
Previous attempts at building a swarm of robots have only yielded around 100 devices. Algorithms that keep these units connected by this time get complicated and they need more expensive and advanced hardware for the robots. The kilobots are different in that, when they are commanded to form a certain shape, four robots act as the design’s point of origin. A 2D map of the image to be made is received by the other robots and instead of going straight to image formation, they split into groups that take turns to move into position. Â Individual kilobots help keep the swarm on track by moving along the edge.
This AI algorithm is clever and great results have been seen from it- considering the robots are limited. Moving in a straight line is usually trouble and the behavior from one robot to another can vary. Still, these kilobots work together and prove that complexity can materialize from simplicity. The kilobots will be used as a test platform by the team for future swarming- not for killing humans, they say.
[Source:Â www.geek.com]